Dymaxion Curve
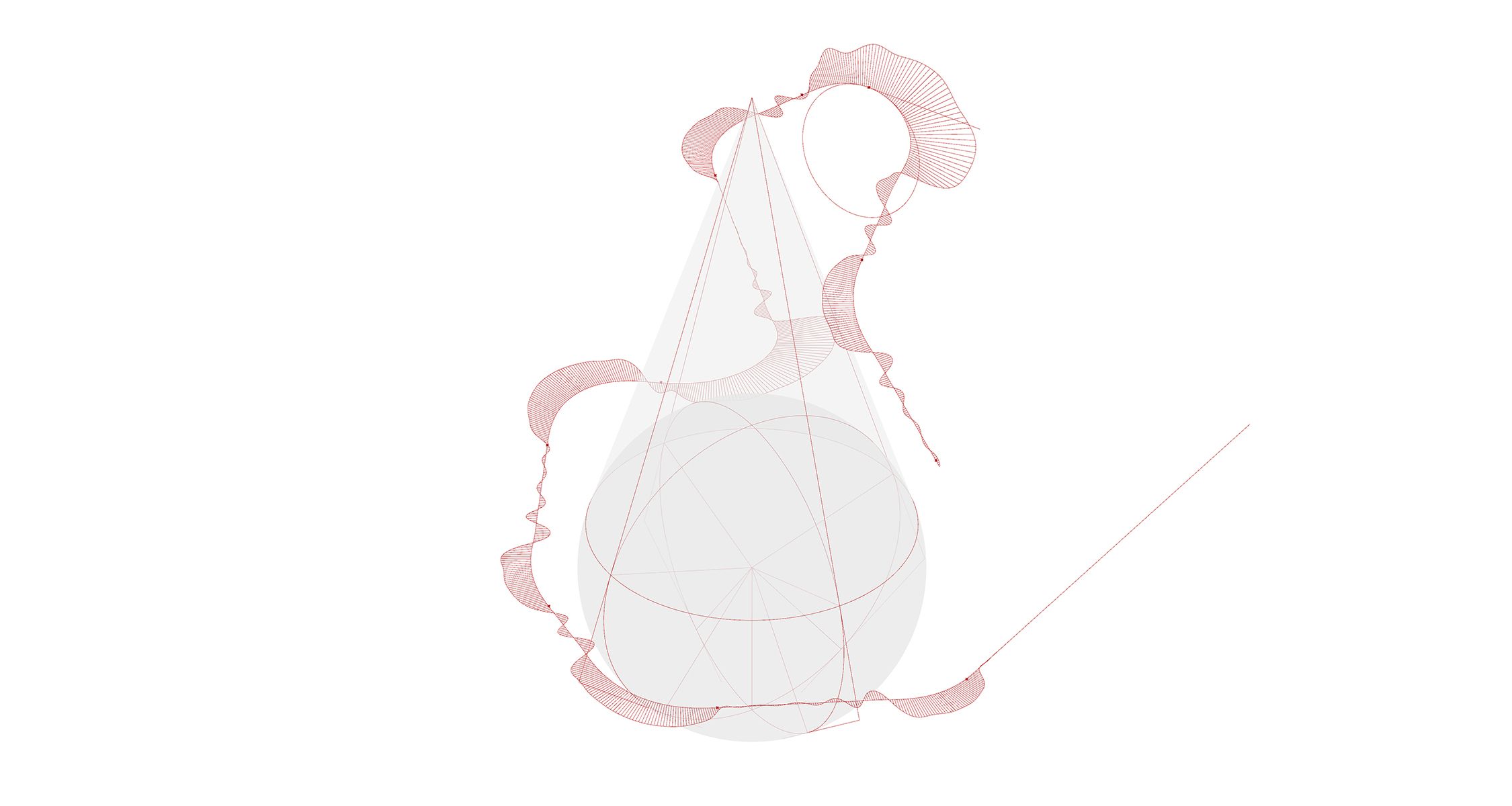
Drone Racing Track with Geodesicon on Conic
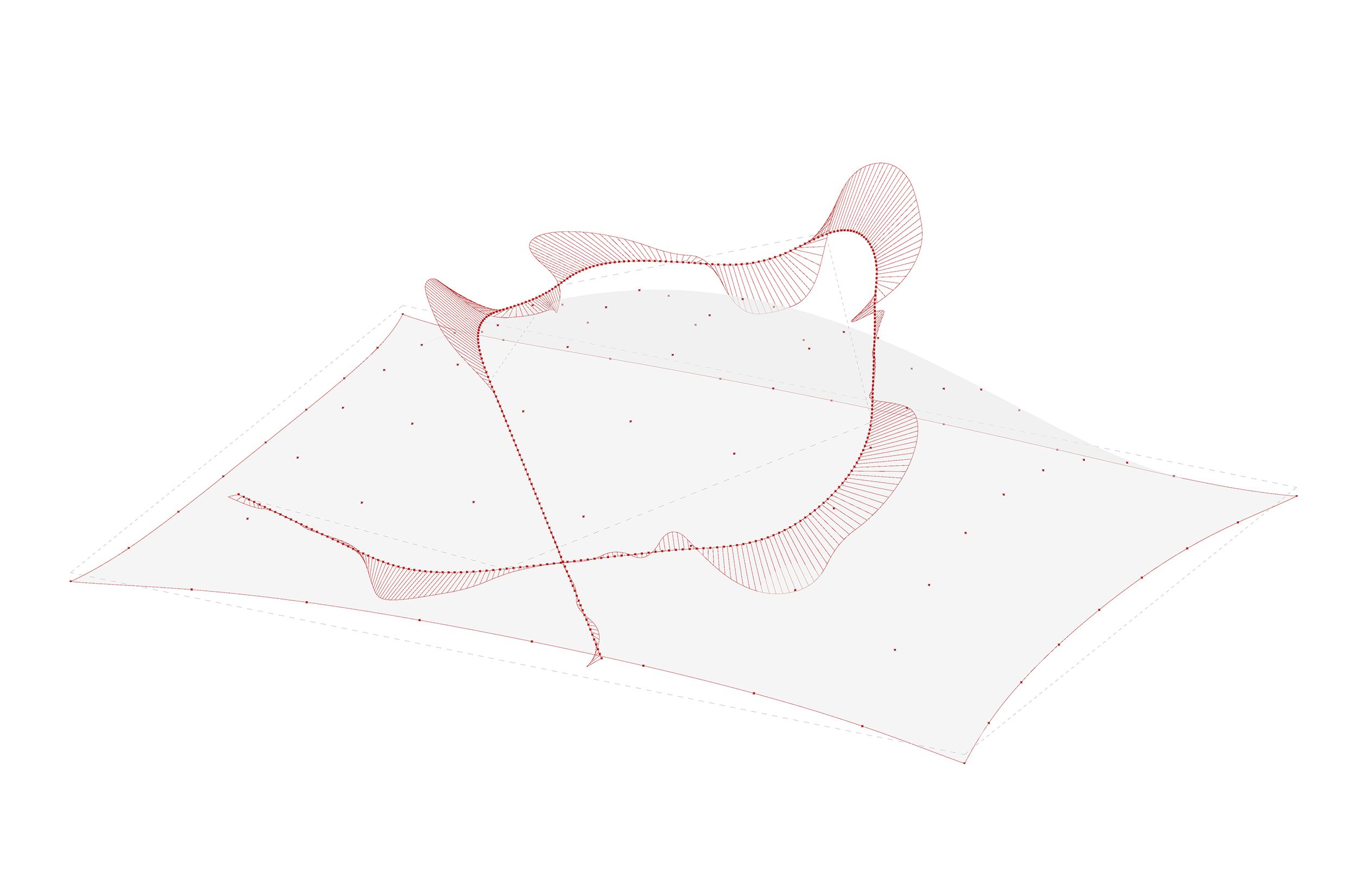
The goal of this project is inventing a new type of drone racing track and a track analyzing methodology. Current drone racing tracks are made of several ring-shaped check points on a ground. The reason they use a series of rings rather than a linear track is because of the wide range of drone’s turning rate (they can usually turn 180 degrees in a second or fly in a perpendicular direction). Although the current drone racing tracks are made of ring-shaped check points, the overall geometry is pretty much like the conventional car racing track.
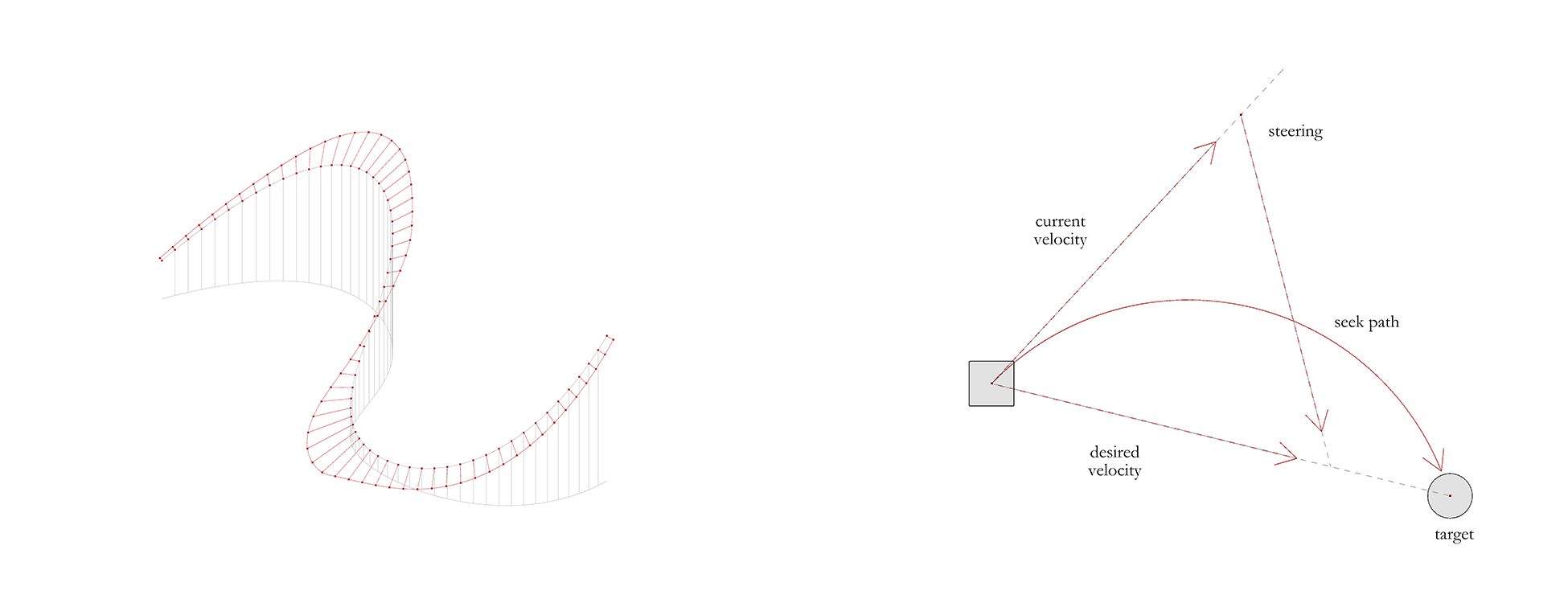
Let’s imagine that there is a base curved surface such as a conic surface, a sphere, or a doubly curved surface which have mostly positive Gaussian curvature. If the surface is convex enough they could act as a constraint to drone’s movement, which means drivers cannot fly straight to the next point and they should find the shortest path between the check points pushing their ways through the base surface. The shortest path on the curved surface is the same as the definition of the geodesic on non-Euclidean geometry. A simulating code considering a set of physical laws (location, velocity, acceleration, etc.) will help defining the geometry of the track, especially the corner condition and testifying which geometry is better or more effective for the racing.