Modulus
A Morphing Tool for Soft Robotics
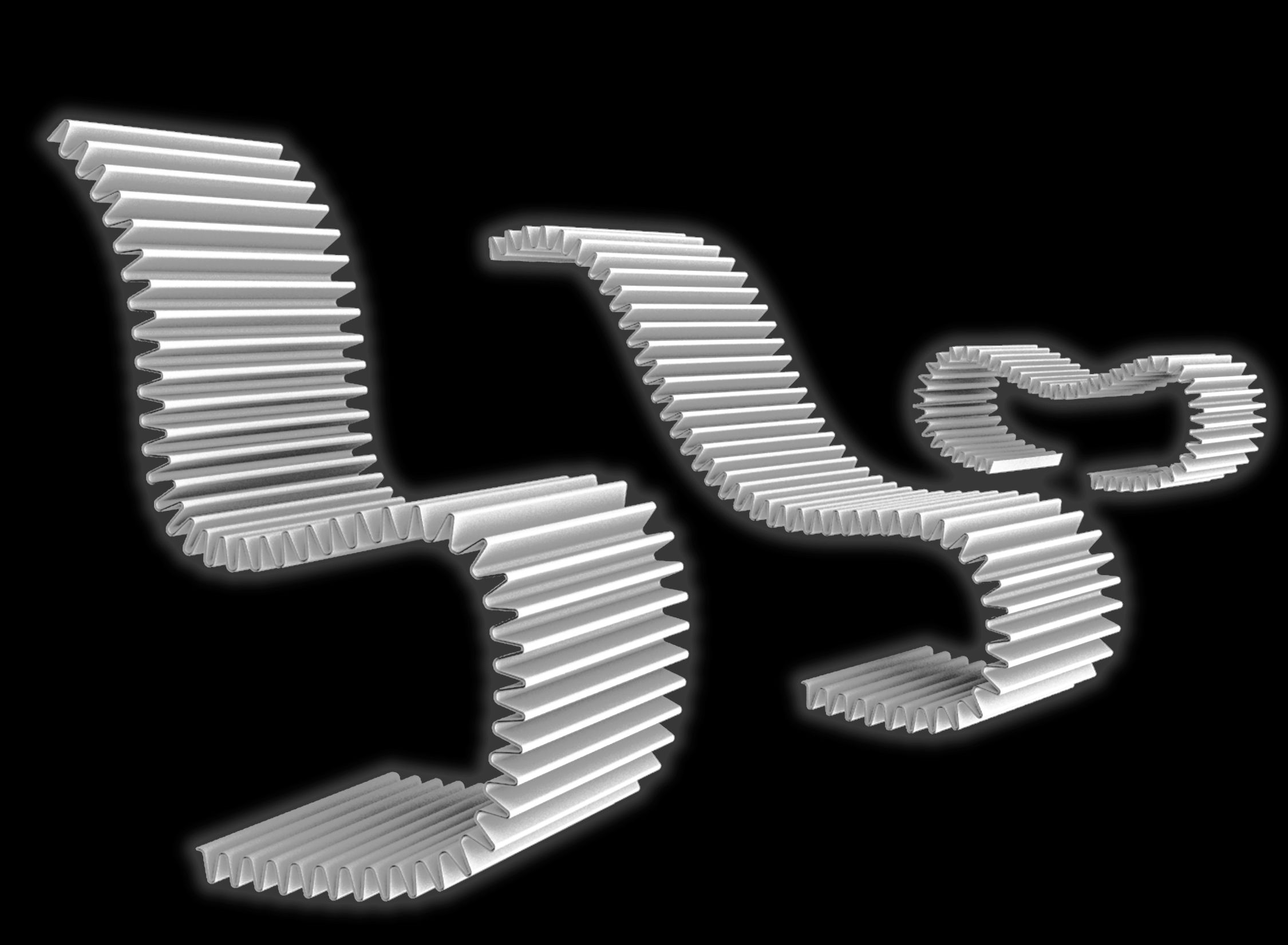
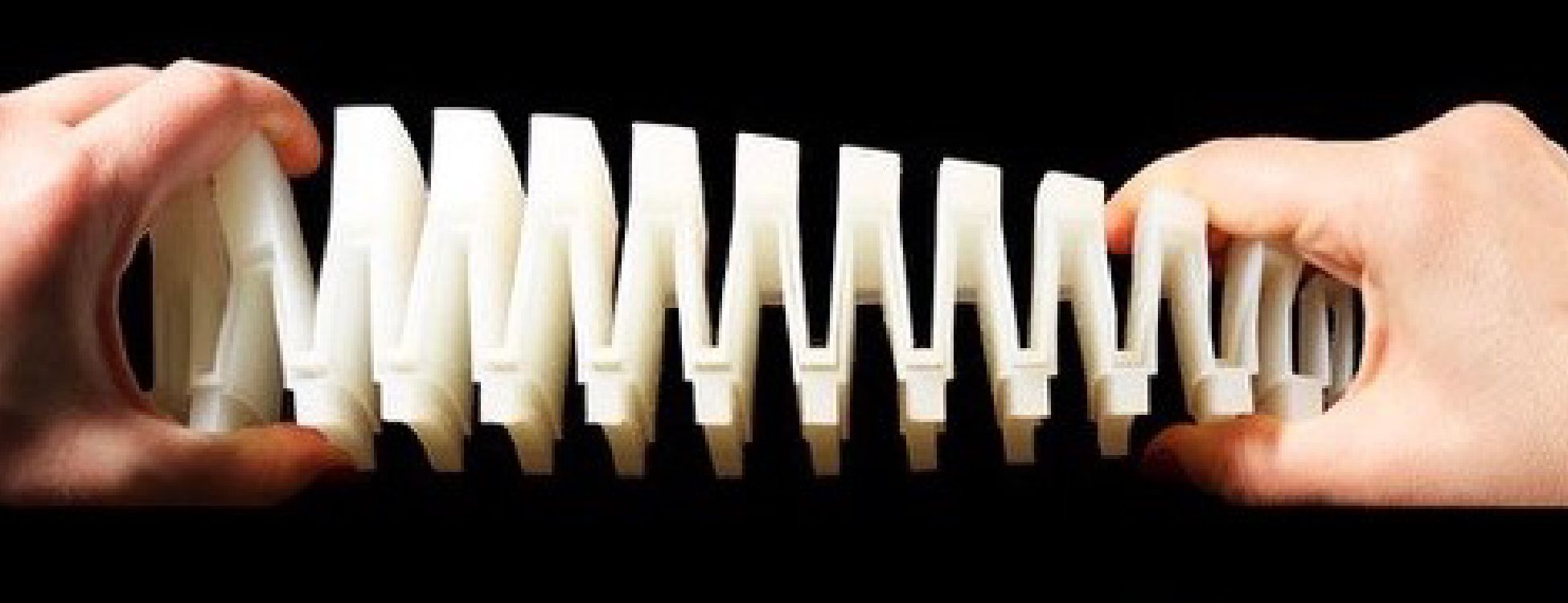
In recent years, robotic furniture applications have been developed as a solution to the problem of space-saving in densely populated urban environments. Modulus explores robotic furniture from a material and geometrical perspective, using computational design to create highly transformable, compliant and reusable materials. Based on a series of physical experiments, the project proposes a technique for bringing to the macroscale material properties that are found in the microscale. The materials simulated in our case study are durable polymers, and the explored properties are bending and stretching.
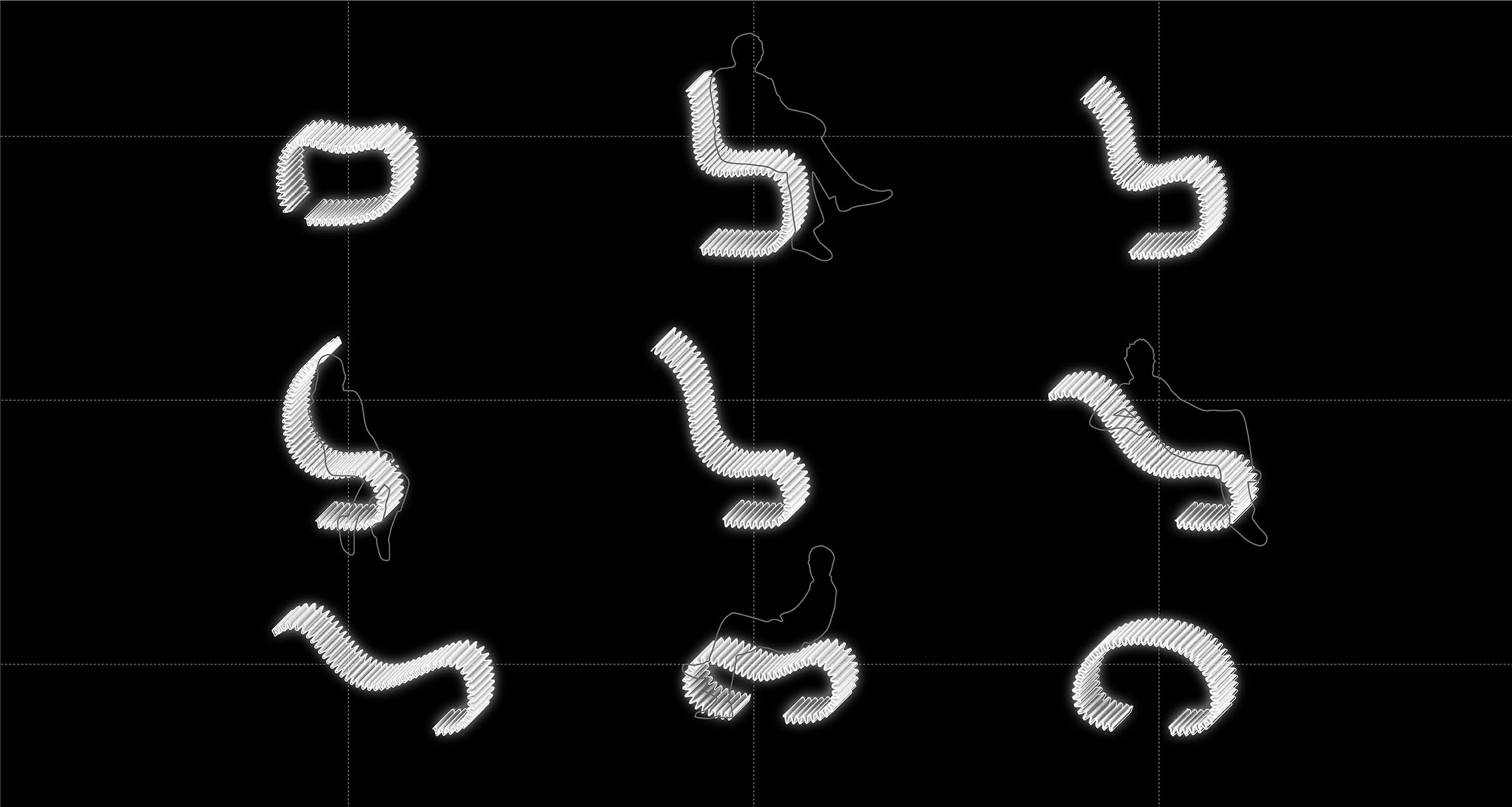
The developed computational design workflow was centered on the objective that a single sheet of material will be able to take a variety of shapes through proper manipulation of geometry. As a case study, the developed code was tested with regards to compatibility, precision and material use in a set of nine different chair shapes. The process concluded to a broad resulting design space with forms of varying curvature, measurements and potential functionality.