Tra[i]l Finder
A Grasshopper Plug-in for Trail Making

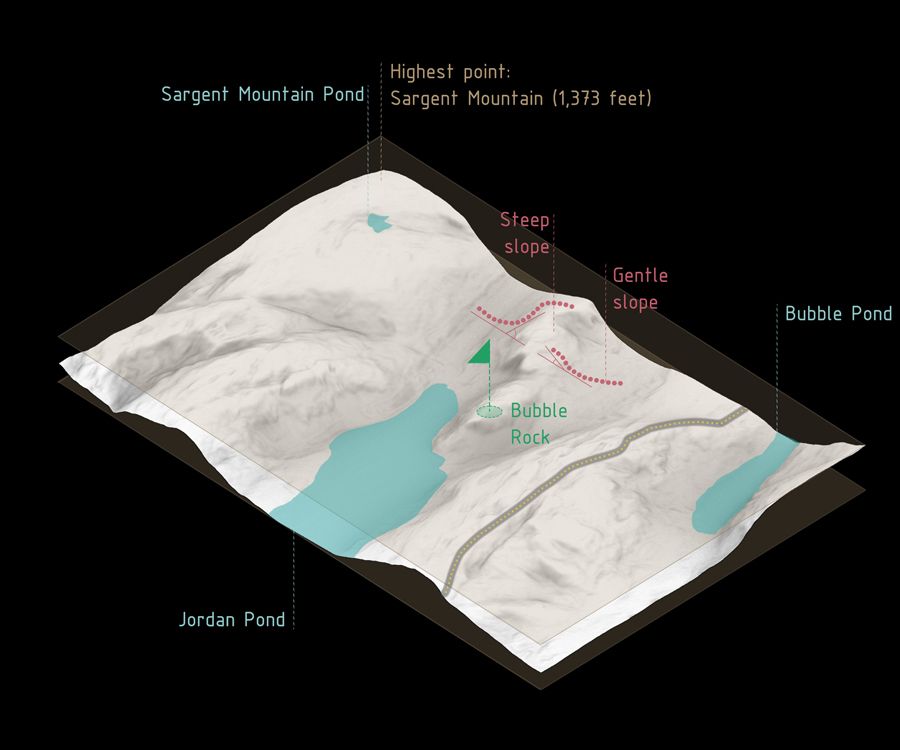
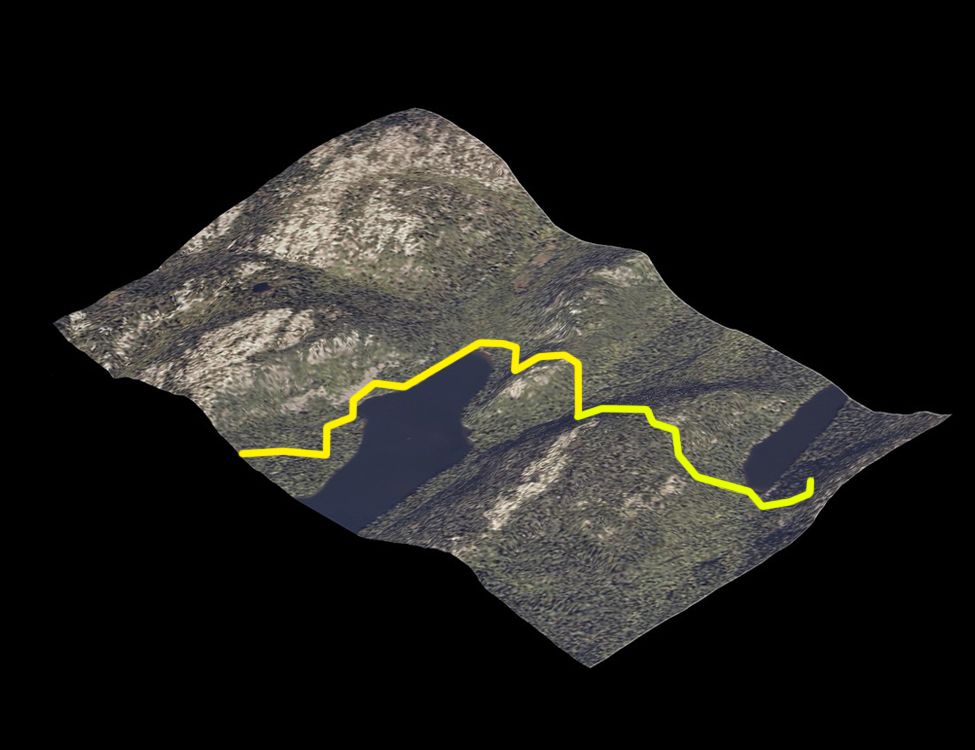
The project develops an optimal pathfinder that incorporates satellite topographic data along with identified parameters to generate a pathfinding algorithm. The code imports the actual topography of existing national parks with various landscape qualities, such as Acadia National Park, Maine, U.S.A, to simulate trail making and compare our simulated trails with existing trails.
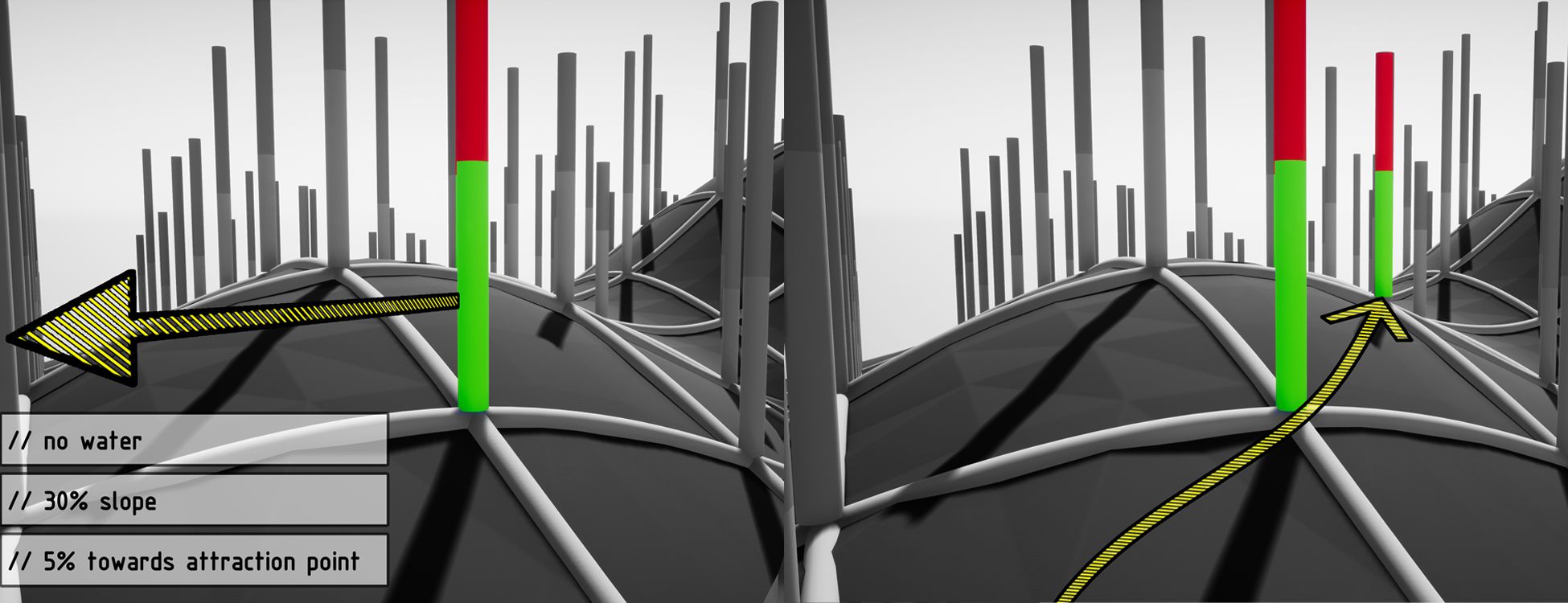
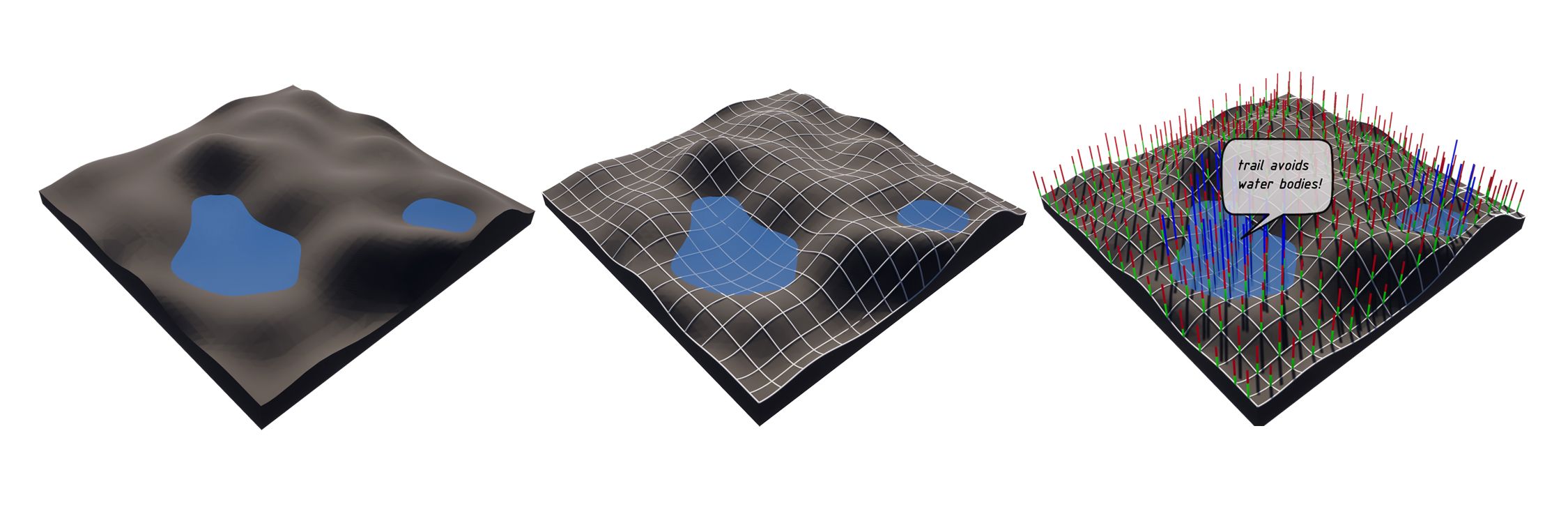
The code subdivides the topography(mesh) and assigns weights to slopes, water bodies, attraction points, and roadways. More the total weight of a point, the less attractive it is to the trailfinder. Thus, waterbodies, roadways and steep slopes get the maximum weight and serve as detours to the trail. In addition, landmarks and site-attractions perform as “attractor points.” that serve as essential components of a successful trail. Lastly, the hiking difficulty directly relates to changes in elevation and distance of the final trail, where the steepness and path length correlate to a difficulty rating of the hike.
Happy Trail Finding!